Zo dan nu maar eens een item over de NAZA-M Software. Om ermee te werken moeten we de Phantom aansluiten, daarbij is wederom de volgorde van belang.
Stap 1. Doe de batterijen in de afstandsbediening en zet deze dan aan.
Stap 2. Sluit de Micro USB kabel aan op de Phantom, sluit de verlengkabel er op aan en doe het andere einde in je PC in een vrije USB poort.
Stap 3. Sluit de LiPo accu aan op de Phantom, de gele stekker op de accu verbinden met de gele stekker in het batterij compartiment.
Start dan op de PC de NAZA-M Assistant v2.20 Software op.
De afbeeldingen hieronder zijn gemaakt zonder dat er een Phantom was aangesloten dus zien er iets anders uit wanneer de Phantom is aangesloten. Linksonder bijvoorbeeld, als de Phantom is aangesloten en herkend zijn de lampjes onderaan, links groen en rechts blauw.
Stap 1. Doe de batterijen in de afstandsbediening en zet deze dan aan.
Stap 2. Sluit de Micro USB kabel aan op de Phantom, sluit de verlengkabel er op aan en doe het andere einde in je PC in een vrije USB poort.
Stap 3. Sluit de LiPo accu aan op de Phantom, de gele stekker op de accu verbinden met de gele stekker in het batterij compartiment.
Start dan op de PC de NAZA-M Assistant v2.20 Software op.
De afbeeldingen hieronder zijn gemaakt zonder dat er een Phantom was aangesloten dus zien er iets anders uit wanneer de Phantom is aangesloten. Linksonder bijvoorbeeld, als de Phantom is aangesloten en herkend zijn de lampjes onderaan, links groen en rechts blauw.
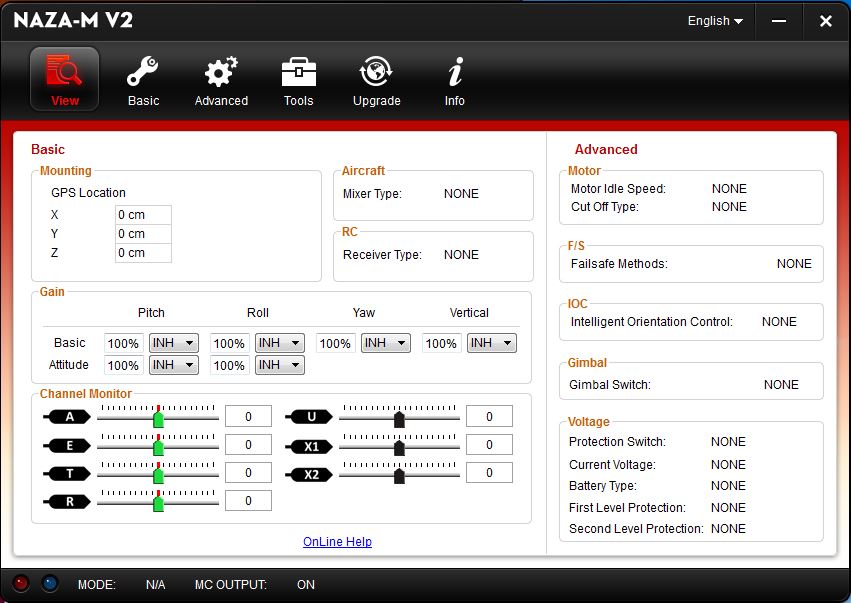
Het eerste scherm hierboven toont een samenvatting van de nodige zaken zoals bijvoorbeeld of de IOC aan staat. Om vast te stellen of de software de Phantom goed herkent kun je op de afstandsbediening de joysticks bewegen, de groene metertjes linksonder zouden dan mee moeten bewegen. Er wordt in dit scherm verder niets ingesteld.
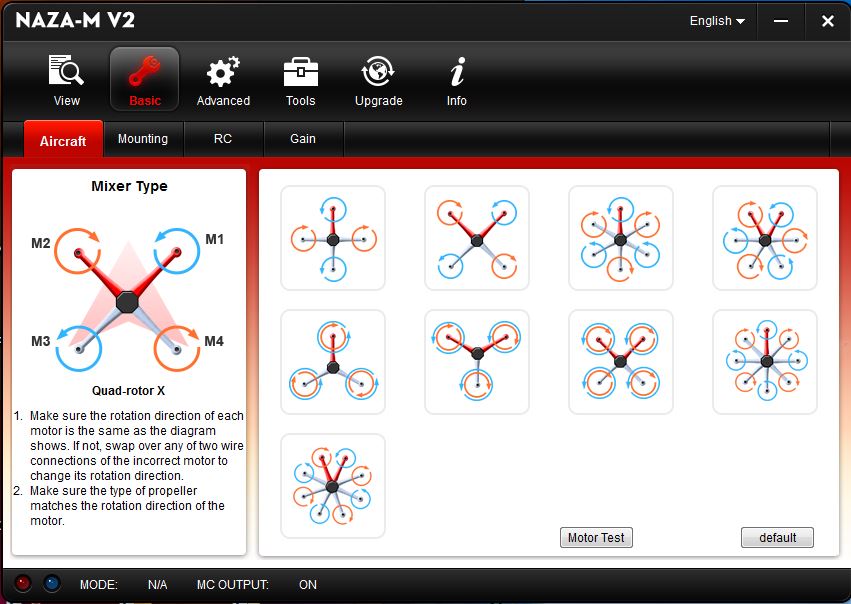
Dan gaan we bovenin naar de volgende button genaamd Basic en stellen vast dat er dan vier tabbladen zijn, we beginnen met de meest rechtse genaamd Aircraft. Hier hoeven we niets in te stellen omdat de Phantom is voor geconfigureerd. Zou je alleen een NAZA-M module kopen (dit is een kastje in je Phantom) dan is die module ook in andere helikopters te gebruiken en moet hier worden aangegeven welke rotor configuratie wordt gebruikt.
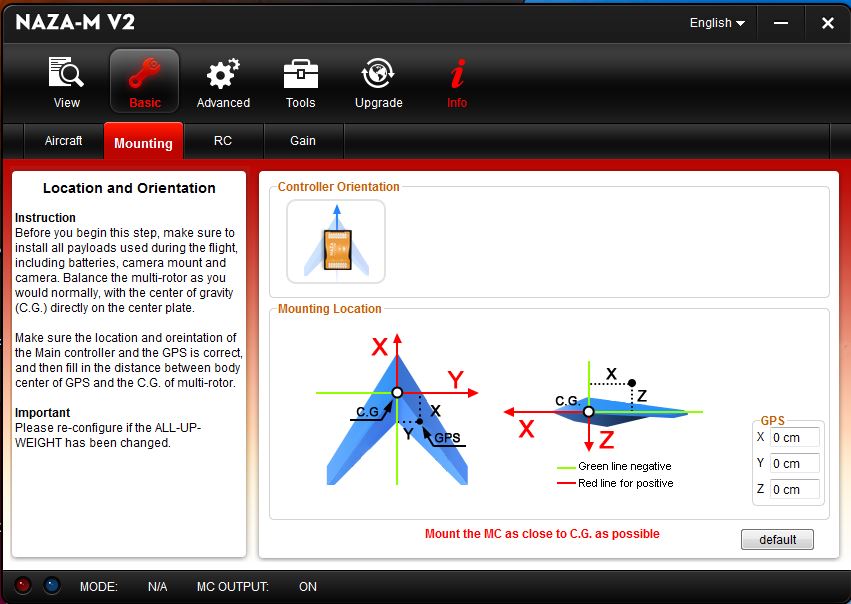
We gaan naar het tweede tabblad Mounting, ook hier moeten we van afblijven dit is vooraf al geconfigureerd in de Phantom. Zou je de losse module gebruiken in een helikopter dan moet je hier aangeven waar je hem plaatst.
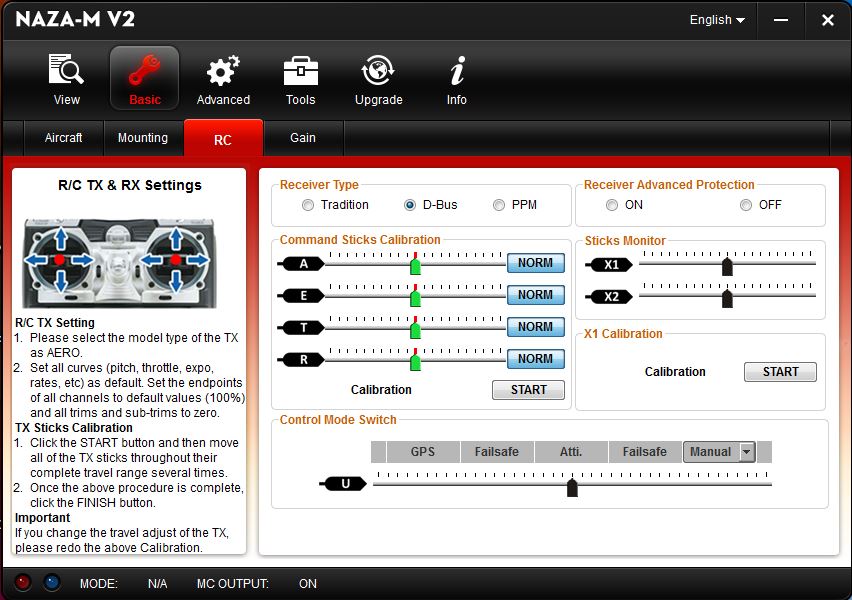
We gaan naar het volgende tabblad genaamd RC. In dit tabblad kan de afstandsbediening gekalibreerd worden als dit een keertje nodig is. Je volgt dan gewoon de stappen, en het gaat eigenlijk om de joysticks eens een paar keer goed rond te draaien in de behuizing. Het receiver type is D-Bus en achter AETR moet NORM staan, de andere optie is REV en betekent Reverse dus dan is boven ineens onder en rechts is ineens links en dat is dus niet handig.
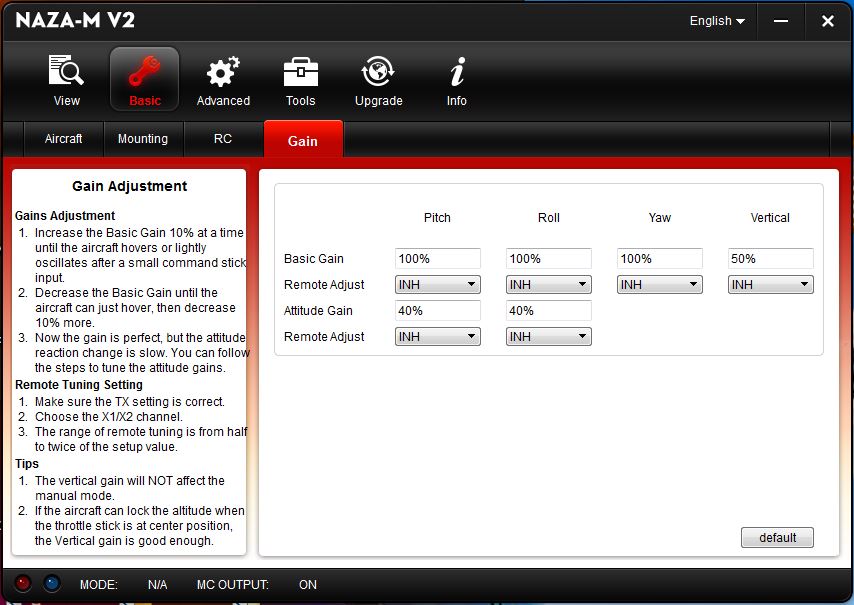
Het laatste tabblad hier is het tabblad Gain in dit tabblad kan wat worden gespeeld met de balans van de quadrocpter. Stel je hebt er ergens wat extra gewicht onder gehangen, je zult dan merken dat de stabiliteit van de vlucht mogelijk wat te lijden heeft. Hier kun je dan door wat met de gain te experimenteren de stabiliteit weer optimaal krijgen. Dit is voor gevorderden dus ik blijf er nog even mooi vanaf.
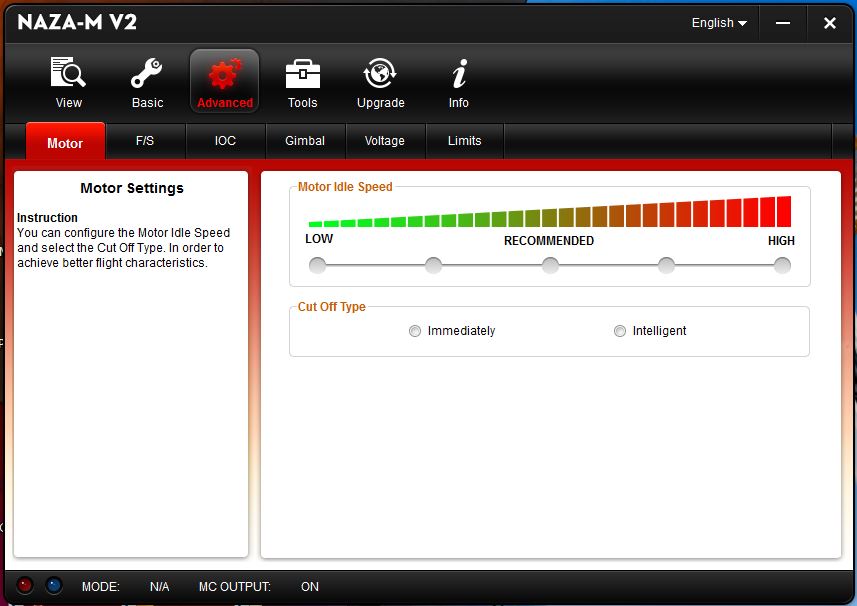
Bovenin gaan we nu naar Advanced, en ook hier stellen we weer vast dat er tabbladen zijn en wel zes stuks, we beginnen weer links met Motor. Bij Motor Idle Speed hoort het middelste bolletje geselecteerd te zijn en het Cut Off Type op Intelligent.
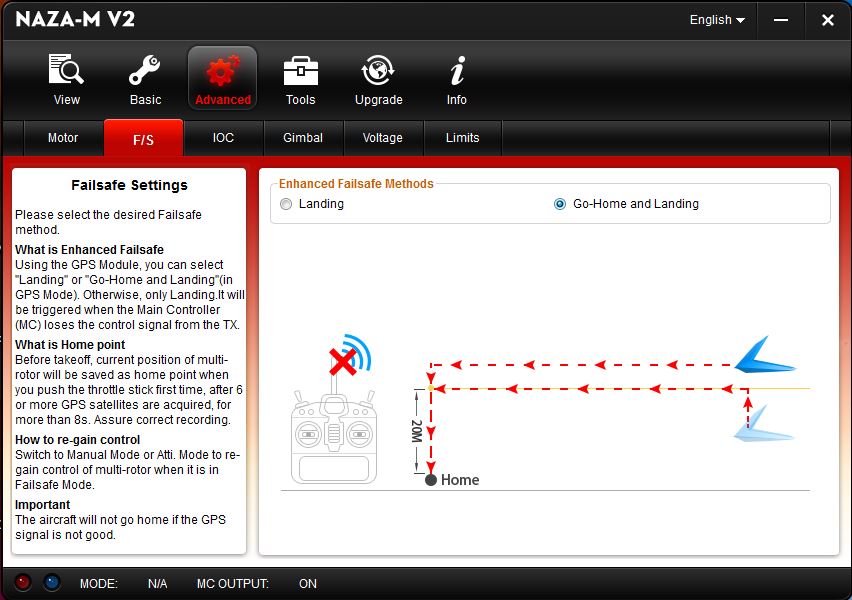
Het volgende tabblad is F/S ofwel de FailSave in dit tabblad geven we aan wat de Phantom moet doen als de connectie met de afstandsbediening verloren gaat. Kies hier voor Go-Home and Landing. Als de situatie zich voordoet dan zal de Phantom stijgen naar ca. 20 meter hoogte en dan in rechte lijn terugvliegen naar het opgeslagen Thuis punt. (door de GPS opgeslagen) Pas op! de Phantom ziet geen bomen en dergelijke dus dit lukt alleen wanneer er geen obstructie onderweg is anders zal de Phantom er tegenaan vliegen. Boven het Thuis punt aangekomen zal hij 10 seconden blijven hangen en dan langzaam dalen en uiteindelijk zelf landen.
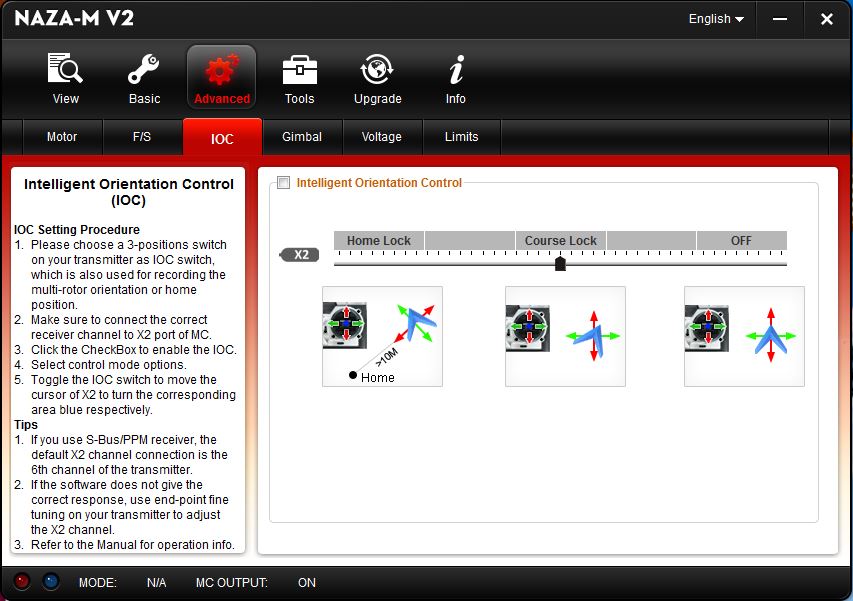
Dan gaan we naar het volgende tabblad IOC ofwel Intelligent Orientation Control. Dit betreft een tweetal functies die het gebruik van de Phantom voor beginner een stuk eenvoudiger kunnen maken namelijk de Course Lock en de Home Lock. Arthur Konze heeft op zijn Youtube kanaal over beide een zeer begrijpelijk filmpje staan dat Youtube kanaal vindt je hier, je moet er echter wel Duits voor kunnen verstaan. Misschien zal ik later eens proberen dit uit te leggen maar. In elk geval staat de IOC standaard uit, als je het wilt gebruiken dan moet je het hier activeren.
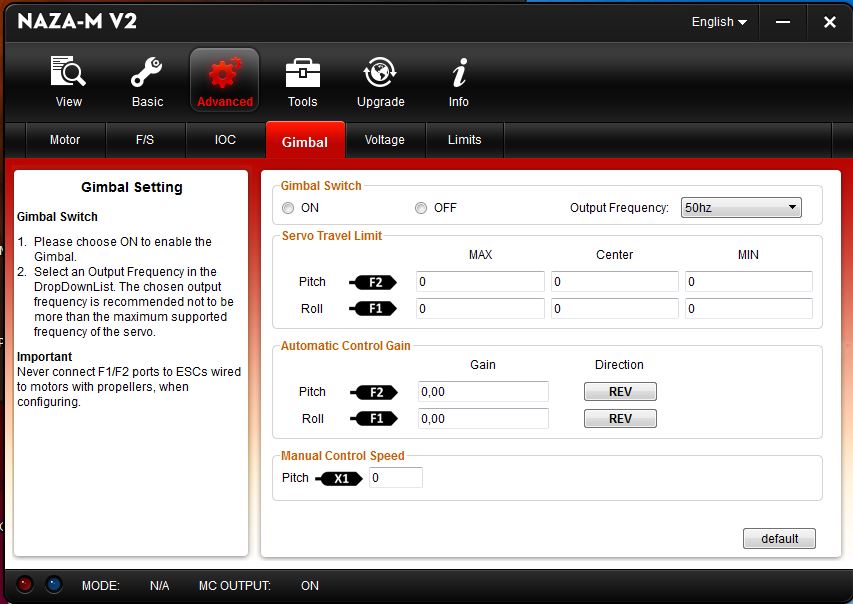
Het volgende tabblad heet Gimbal en wordt alleen dan gebruikt wanneer je onder je Phantom i.p.v. de standaard camera houder een Gimbal gaat monteren. Een Gimbal is een houder die in allerlei richtingen kan meedraaien en zo het beeld van een camera kan stabiliseren. Doordat ze doorgaans aangestuurd worden vanuit de NAZA-M moet er hier het e.e.a. ingesteld worden als je een Gimbal gebruikt. Omdat die er niet vanaf de fabriek bij zit veranderen we hier nu niets.
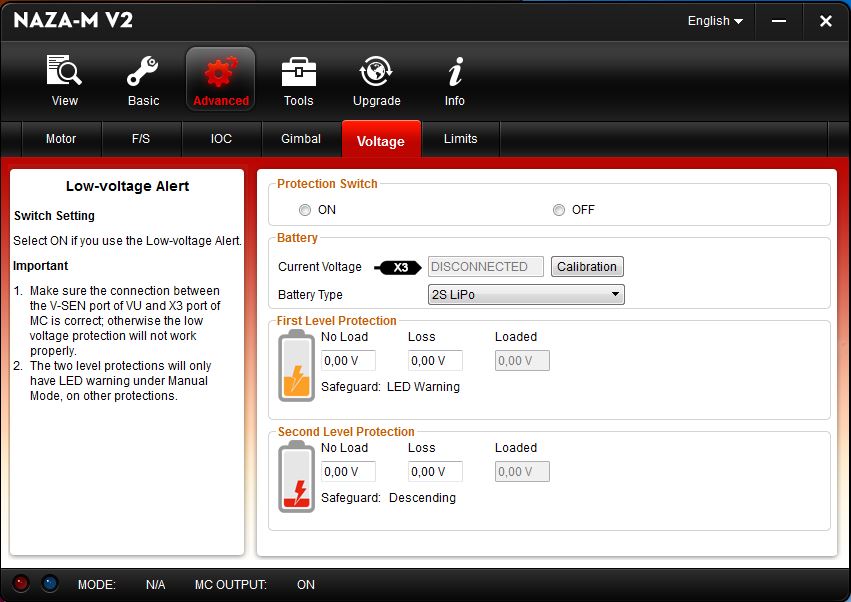
Dan krijgen we het tabblad Voltage, in dit tabblad wordt ingesteld wanneer de Phantom moet gaan waarschuwen dat de LiPo accu leeg begint te raken. Het type accu dat gebruikt wordt is een 3S LiPo dus het plaatje geeft het fout weer. De eerste waarschuwing wordt alleen in een LED code op de Phantom weergegeven bij de tweede zal de Phantom gaan landen.
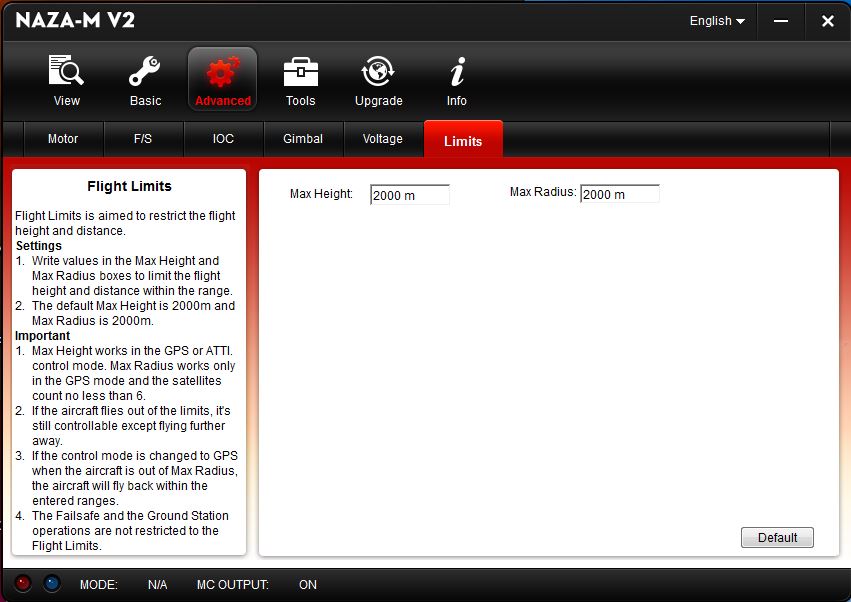
Laatste tabblad hier is het tabblad Limits, hier kun je instellen hoe ver je Phantom weg mag vliegen van jou. In de Europese CE mode is de afstand maximaal ca. 300 meter. Naar boven zou je hem niet meer zien of horen dus hier kun je, als je dat wilt hem wat beperken.
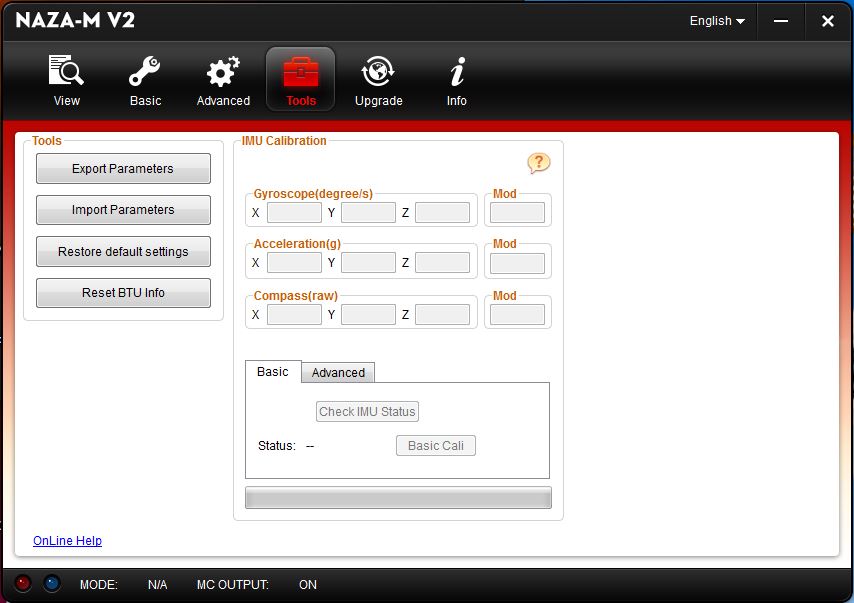
We gaan nu naar Tools. Hier vinden we links de mogelijkheden om je settings te exporteren en zodoende op te slaan op je PC maar ook de mogelijkheid om ze weer terug te zetten ofwel te importeren. Ook kun je hier de standaardwaarden weer terug zetten. Belangrijkste is dat hier de IMU kalibratie plaats vindt. In de handleiding, die ik probeer te vertalen, staat een aantal keer vermeld dat de LED's bijvoorbeeld aangeven dat er een IMU kalibratie nodig is.
Hoe doe je dat nu?: Plaats de Phantom op een egaal vlak, liefst een waterpas vlak en kom er niet aan. Zorg ervoor dat hij is aangesloten op de PC, bovenaan de pagina lees je in welke volgorde je dat doet. Klik dan op Check IMU Status, de NAZA-M Software zal je vertellen of de kalibratie nodig is. Wil je hem toch uitvoeren of geeft de software aan dat je de kalibratie moet uitvoeren klik dan op Basic Cali en blijf van de Phantom af totdat de software meldt dat hij is gekalibreerd. Er is ook nog een Advanced kalibratie voor als de Phantom echt flink van slag is, het werkt op dezelfde manier duurt alleen een stuk langer.
Hoe doe je dat nu?: Plaats de Phantom op een egaal vlak, liefst een waterpas vlak en kom er niet aan. Zorg ervoor dat hij is aangesloten op de PC, bovenaan de pagina lees je in welke volgorde je dat doet. Klik dan op Check IMU Status, de NAZA-M Software zal je vertellen of de kalibratie nodig is. Wil je hem toch uitvoeren of geeft de software aan dat je de kalibratie moet uitvoeren klik dan op Basic Cali en blijf van de Phantom af totdat de software meldt dat hij is gekalibreerd. Er is ook nog een Advanced kalibratie voor als de Phantom echt flink van slag is, het werkt op dezelfde manier duurt alleen een stuk langer.
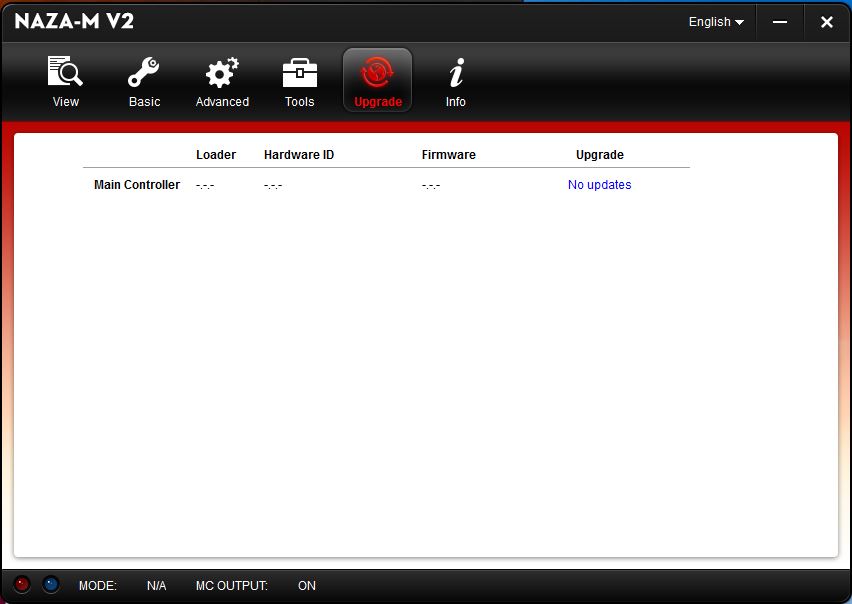
We gaan nu naar Upgrade, hier wordt getoond welke versie software de Phantom, de afstandsbediening en de GPS hebben en welke versie de huidige versie is. Als er dus verschil is moet er een update worden uitgevoerd, dat doe je door te klikken op de huidige versie en dan de stappen te volgen en de gegeven informatie te lezen. (hier wordt nu niets getoond omdat de Phantom niet is aangesloten)
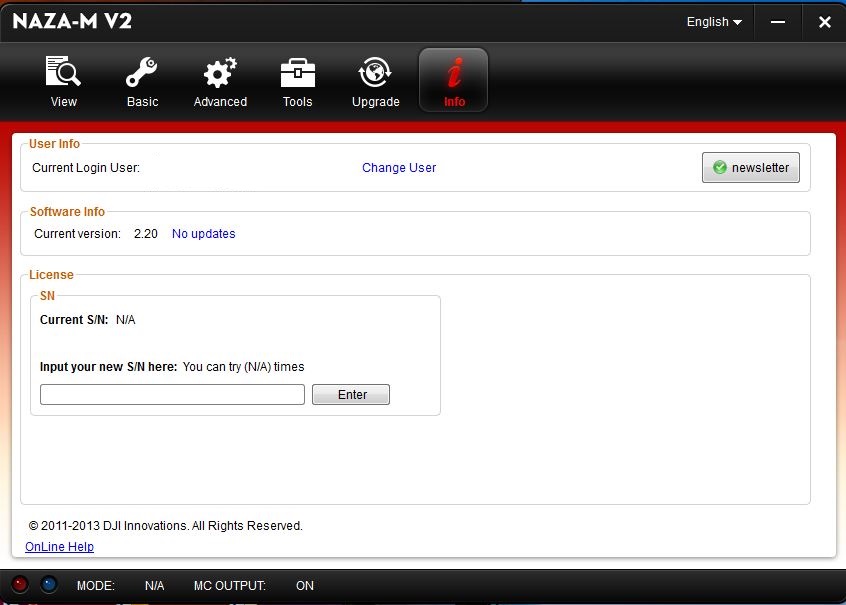
Als laatste hebben we nog Info. Hier vinden we gegevens over jouw Phantom zoals het mailadres waarop hij is geregistreerd en het Serienummer hier hoeven we dan ook niets te veranderen.
Als we het programma verlaten dan doen we ook dat weer in een specifieke volgorde, eerst halen we de LiPo accu uit de Phantom en koppelen deze los. Dan zetten we de afstandsbediening uit en tot sluit sluiten we het programma NAZA-M Assistant af.
Als we het programma verlaten dan doen we ook dat weer in een specifieke volgorde, eerst halen we de LiPo accu uit de Phantom en koppelen deze los. Dan zetten we de afstandsbediening uit en tot sluit sluiten we het programma NAZA-M Assistant af.
